Robotik
Projelendirmeler:
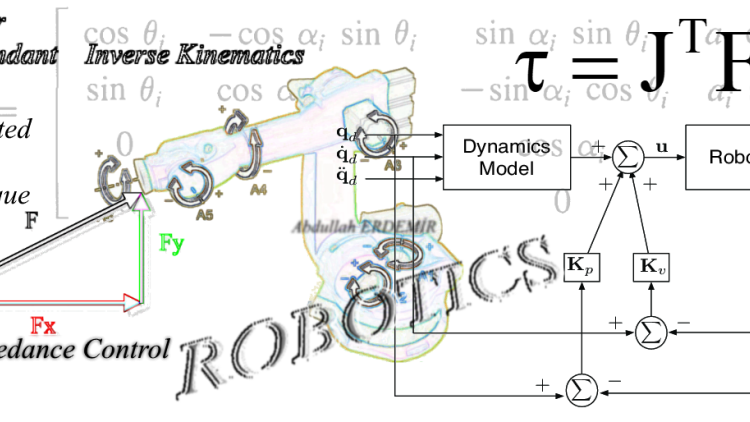
1. Non-Redundant Ters Kinematik:

Uç noktanın hedeflenen konum ve hedeflenen oryantasyonda sınırlı sayıda \( \theta \) uzayı ile elde edilebilmesi durumunda bu robota non-redundant robot veya tam tanımlı robot denir. Bu tip robotlara 2 eksenli manipülatör, 6 eksenli endüstriyel robotlar verilebilir. Bu tip robotların ters kinematiği analitik olarak çözürlürken sınırlı sayıda çözüm bulunur.
Bu tip robotlar piyasada çok yaygındır. Fakat bu tip robotlar engellerin etrafından dolaşabilme kabiliyetleri yoktur. Engel etrafında dolaşma kabiliyeti istendiği zaman redundant robotlar öne çıkmaktadır.
2. Redundant Ters Kinematik…

3. Empedans Kontrol…
Empedans kontrol ile hem redundant robotlarda hem de redundant olmayan robotlarda konum ve kuvvet kontrolü yapılabilmektedir.
4. Ters Dinamik…
Bir robotun tüm anlarında ihtiyaç olan torkun hesaplanması düz dinamiktir.
Bir robotun tüm anlarında uygulanan torklara karşılık tüm anlardaki konumun hesaplanması ise ters dinamiktir. Ters dinamik hesaplamaya daha çok iteratif simülasyon yaparken ihtiyaç olmaktadır.
Robotik projelendirmesi için Bize Ulaşın
