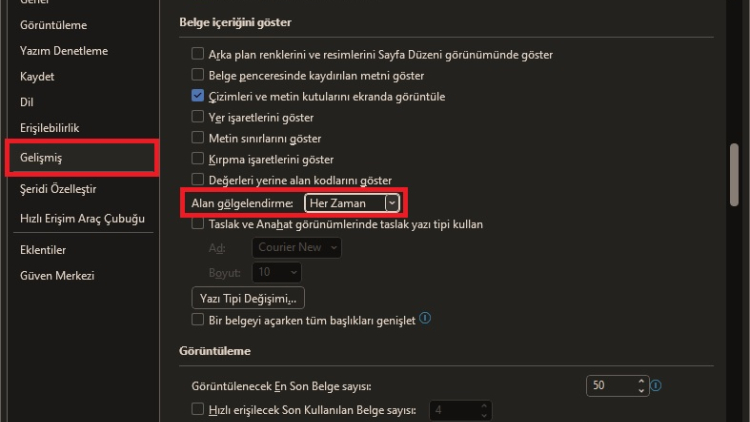
Microsoft Word, belgelerinize dinamik içerikler eklemek için, geçerli tarih veya saat, sayfa numaraları veya yaptığınız değişikliklere bağlı olarak otomatik olarak güncellenen denklemler gibi alan kodlarını kullanmanıza olanak sağlar. Denklemlerde alan kodlarını kullanmak için:
- Denklem Düzenleyi...